|
Monitoraggio dell'impatto delle mareggiate con sensori LiDAR permanentiLa morfologia della spiaggia e la sua misuraLa spiaggia non è una superficie statica: cambia continuamente di forma sotto l'azione delle onde, delle correnti, del vento e degli eventi di mareggiata. Alcune zone accumulano sedimento e avanzano verso il mare, altre si abbassano progressivamente fino a sparire. Misurare con precisione la quota della sabbia lungo un transetto perpendicolare alla riva, ripetendo la misura nel tempo, permette di ricostruire la storia morfologica del sito, quantificare l'impatto delle mareggiate sul profilo di spiaggia e individuare in anticipo i settori a maggior rischio di erosione costiera. Il sistema LiDAR della rete RVMC acquisisce automaticamente il profilo altimetrico della spiaggia con un laser scanner fisso installato in quota. A partire da queste scansioni, una procedura automatica calcola la quota media del profilo, quantifica le variazioni cumulative rispetto allo stato iniziale di monitoraggio e classifica ogni punto del transetto in base al suo comportamento morfologico nel tempo. Schema della proceduraIl processo si articola in tre stadi sequenziali, eseguiti in cascata su ogni insieme di acquisizioni disponibili per una stazione.
1. Preprocessing — ogni scansione grezza viene corretta geometricamente
per l'inclinazione residua del sensore, filtrata dagli outlier e interpolata su una griglia
spaziale regolare. Stadio 1 — Preprocessing delle scansioniIl concettoOgni volta che il sensore laser acquisisce una scansione, il risultato è una nuvola di punti: per ciascun raggio emesso, il sistema registra la distanza dall'ostacolo colpito. Prima di poter confrontare scansioni diverse tra loro, è necessario “pulire” questi dati grezzi: eliminare i punti chiaramente erronei, correggere le piccole imprecisioni di installazione del sensore e riportare tutti i profili sulla stessa griglia spaziale. Questo stadio è paragonabile alla preparazione del campione prima di una misura di laboratorio: senza di esso, i risultati dell'analisi successiva sarebbero difficilmente confrontabili tra acquisizioni diverse. Approfondimento tecnico
Il preprocessore (
1. Correzione pitch — rotazione rigida del profilo attorno al centro
ottico del sensore per compensare l'inclinazione verticale residua del supporto di montaggio.
L'angolo di correzione (θpitch) è determinato per ogni stazione tramite
regressione lineare sui residui della validazione DGPS (vedi Stadio 3).
La configurazione geometrica di ciascuna stazione (quota sensore, angolo pitch, estremi
del transetto, soglia sabbia) è centralizzata nel file Nota sul centro ottico dei sensori SICK LD-LRS.
Nei sensori SICK LD-LRS il centro ottico (specchio rotante che emette il laser) si trova
circa 14 cm più in basso rispetto alla flangia meccanica di fissaggio. Le misure di
quota del sensore effettuate in campo si riferiscono alla flangia meccanica e devono essere
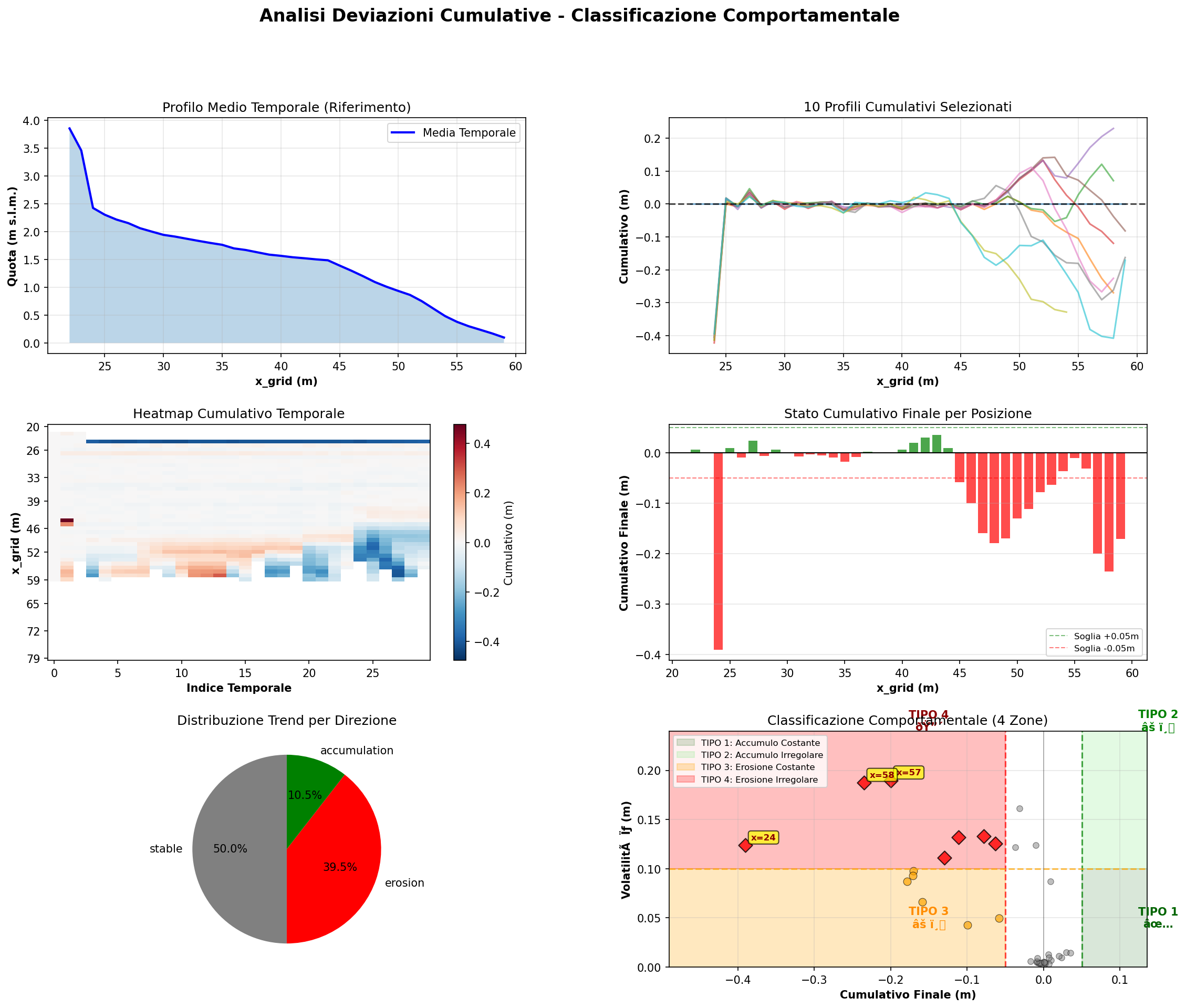
corrette con l'offset appropriato ( Stadio 2 — Analisi multi-temporale e classificazione morfologicaIl concettoUna volta raccolte abbastanza scansioni nel tempo, il sistema le confronta tutte insieme per capire come si è evoluta la spiaggia. Per ogni punto del transetto calcola due informazioni: quanto è cambiata la quota rispetto all'inizio del monitoraggio (il cambiamento cumulativo) e quanto instabile è stato quel punto nel corso del tempo (la volatilità). Combinando queste due misure, ogni punto del profilo viene classificato in una di quattro categorie. I settori in accumulo costante mostrano una quota crescente e stabile nel tempo: la sabbia si deposita progressivamente. I settori in erosione irregolare sono i più critici: la quota scende nel medio periodo, ma con fluttuazioni ampie che indicano un sistema instabile e soggetto a impatti ricorrenti delle mareggiate.
Fig. 1 — Grafico di volatilità morfologica: ogni punto rappresenta una posizione lungo il transetto. L'asse orizzontale misura il cambiamento cumulativo netto rispetto alla prima acquisizione; l'asse verticale la volatilità nel tempo. I quattro quadranti identificano i tipi comportamentali TIPO 1–4. Approfondimento tecnico
Il processore multi-temporale (
• Media temporale z̄(x) — quota media osservata su tutte
le acquisizioni disponibili, prodotta nel file La combinazione di fc(x) e σ(x) determina la classificazione di ciascun punto:
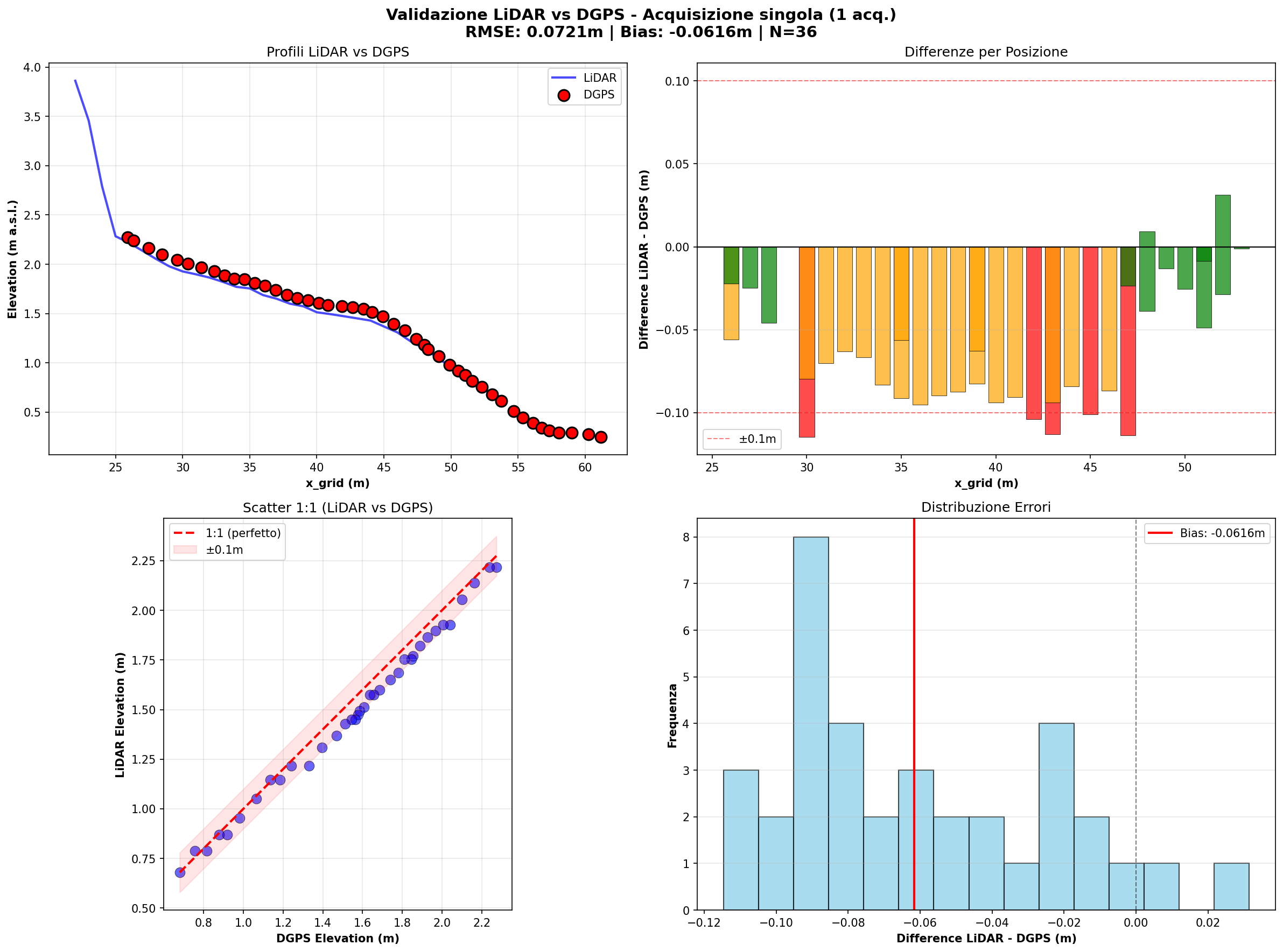
Il TIPO 4 identifica i settori a maggiore vulnerabilità: ambienti soggetti sia a perdita netta di sedimento sia a fluttuazioni ampie nel tempo. È il segnale di risposta più forte ai cicli di erosione e accrezione indotti dalle mareggiate. I punti TIPO 4 sono evidenziati con simbolo a diamante rosso nel grafico di volatilità. Stadio 3 — Validazione DGPS-RTK e calibrazione geometricaIl concettoPer sapere quanto ci si può fidare delle misure LiDAR, periodicamente un operatore percorre fisicamente la spiaggia con un ricevitore GPS di alta precisione (DGPS-RTK), registrando la quota della sabbia in una serie di punti lungo il transetto monitorato. Questi dati di campo, precisi al centimetro, vengono poi confrontati automaticamente con i profili LiDAR: la differenza residua — l'errore del sistema — viene misurata e, se necessario, utilizzata per correggere la geometria del sensore. Il processo è simile alla taratura periodica di uno strumento di misura: anche un sensore ben installato può accumulare piccoli errori nel tempo, e la comparazione con misure indipendenti è l'unico modo per rilevarli e correggerli.
Fig. 2 — Confronto tra il profilo LiDAR (linea continua) e le misure DGPS-RTK (punti). L'accordo è valutato tramite RMSE, bias sistematico e distribuzione spaziale dei residui. Approfondimento tecnico
Lo script di validazione (
1. Proiezione sul transetto — la posizione UTM del punto DGPS
viene convertita in coordinata Le metriche calcolate sono:
I livelli di qualità operativa definiti per il sistema RVMC sono:
Quando i residui mostrano un andamento sistematico crescente con la distanza dal sensore
(errore lineare in residuo(x) = a · x + b → θpitch = arctan(a)
L'angolo stimato viene inserito nel file Risultati di validazione delle stazioni pilotaAttualmente, due stazioni sono state validate con dati DGPS-RTK di campo. I risultati documentano documentalo la progressione del processo di calibrazione.
La stazione Kufra ha richiesto un processo di calibrazione completo in due passi:
la correzione dell' Le restanti 3 stazioni LIDAR (Senigallia, Viareggio, Marina di Castagneto Carducci) sono in attesa delle rispettive campagne di rilievo in campo. Rete di stazioni e sistema operativoLa rete conta attualmente 11 stazioni di cui 5 equipaggiate con sensori SICK LD-LRS, distribuite lungo le coste adriatica e tirrenica. I dati grezzi vengono archiviati in formato CSV sul server di elaborazione ISPRA e processati periodicamente attraverso la pipeline descritta in questa pagina. I risultati — profili medi, mappe di variazione cumulativa e grafici di volatilità — sono consultabili nell' Analizzatore Multitemporale LiDAR e nell'Analizzatore Scansioni LiDAR.
La configurazione centralizzata in Continua alla pagina succesiva: monitoraggio della risalita ondosa sulla spiaggia |