|
Beach morphology and its measurementThe beach is not a static surface: it continuously changes shape under the action of waves, currents, wind and storm events. Some areas accumulate sediment and advance towards the sea, others progressively lower until they disappear. Precisely measuring the sand elevation along a transect perpendicular to the shoreline, and repeating the measurement over time, allows reconstruction of the morphological history of the site and early identification of the areas most at risk of erosion. The LiDAR system of the RVMC network automatically acquires the altimetric profile of the beach with a fixed laser scanner installed at height. From these scans, an automatic procedure calculates the mean profile elevation, quantifies cumulative variations with respect to the initial monitoring state and classifies each transect point based on its morphological behaviour over time. Procedure overviewThe process is structured in three sequential stages, executed in cascade on each set of acquisitions available for a station.
1. Preprocessing — each raw scan is geometrically corrected
for residual sensor tilt, filtered for outliers and interpolated onto a
regular spatial grid. Stage 1 — Scan preprocessingThe conceptEach time the laser sensor acquires a scan, the result is a point cloud: for each emitted ray, the system records the distance to the hit obstacle. Before different scans can be compared, it is necessary to “clean” these raw data: remove clearly erroneous points, correct small installation inaccuracies of the sensor and bring all profiles onto the same spatial grid. This stage is comparable to sample preparation before a laboratory measurement: without it, the results of the subsequent analysis would be difficult to compare across different acquisitions. Technical details
The preprocessor (
1. Pitch correction — rigid rotation of the profile around the optical
centre of the sensor to compensate for residual vertical tilt of the mounting bracket.
The correction angle (θpitch) is determined for each station via
linear regression on DGPS validation residuals (see Stage 3).
The geometric configuration of each station (sensor elevation, pitch angle, transect
limits, sand threshold) is centralised in the Note on the optical centre of SICK LD-LRS sensors.
In SICK LD-LRS sensors of the RVMC the optical centre (rotating mirror that emits the laser) results located
approximately 14 cm below the mechanical fixing flange. Field measurements of
sensor elevation refer to the mechanical flange and must be
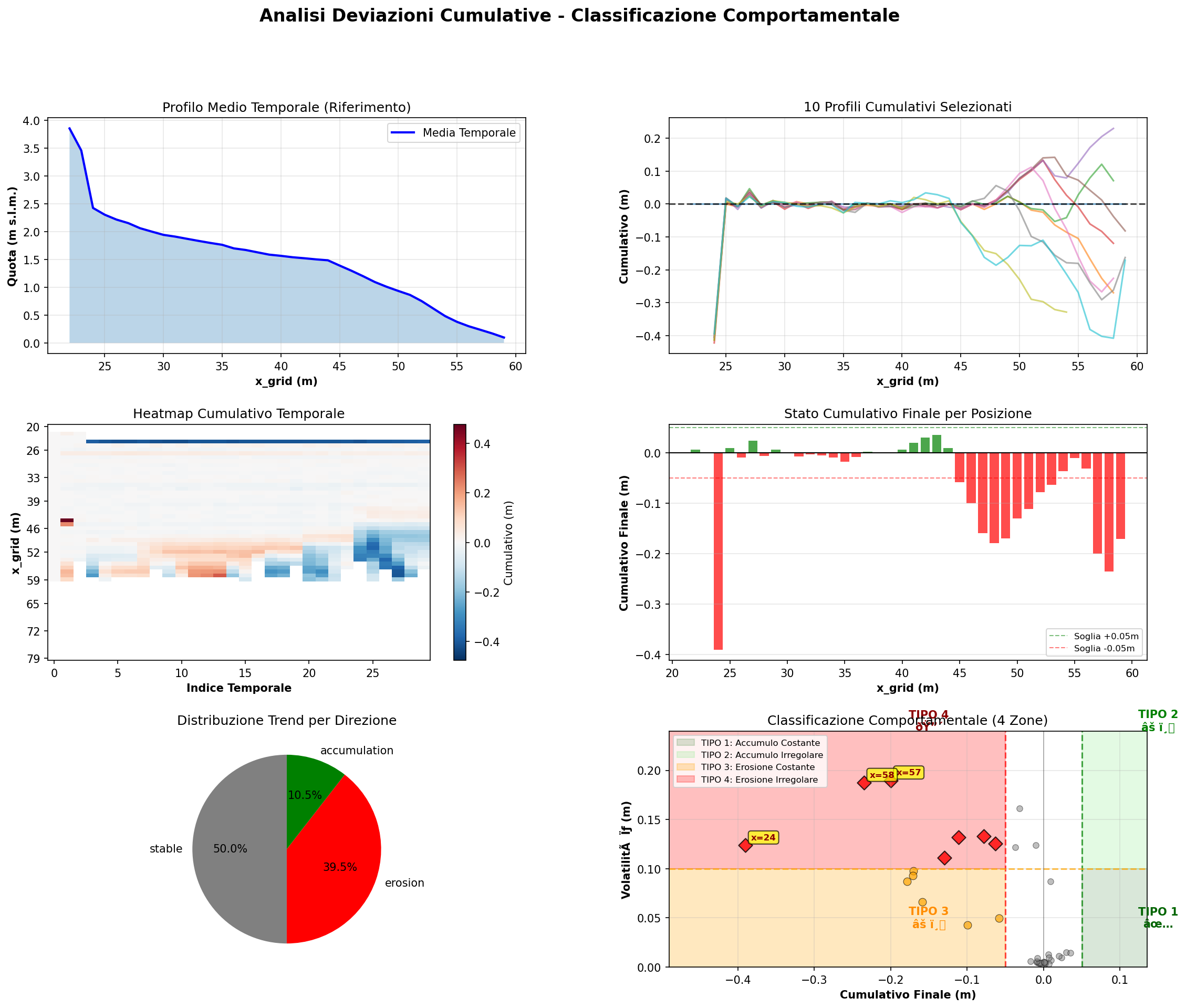
corrected with the appropriate offset ( Stage 2 — Multi-temporal analysis and morphological classificationThe conceptOnce enough scans have been collected over time, the system compares them all together to understand how the beach has evolved. For each transect point it calculates two pieces of information: how much the elevation has changed since the start of monitoring (the cumulative change) and how unstable that point has been over time (the volatility). By combining these two measures, each profile point is classified into one of four categories. Areas of steady accumulation show an increasing and stable elevation over time: sand is progressively deposited. Areas of irregular erosion are the most critical: elevation decreases over the medium term, but with large fluctuations that indicate an unstable system subject to recurring storm impacts.
Fig. 1 — Morphological volatility chart: each point represents a position along the transect. The horizontal axis measures the net cumulative change with respect to the first acquisition; the vertical axis shows volatility over time. The four quadrants identify the behavioural types TYPE 1–4. Technical details
The multi-temporal processor (
• Temporal mean z̄(x) — mean elevation observed across all
available acquisitions, produced in the file The combination of fc(x) and σ(x) determines the classification of each point:
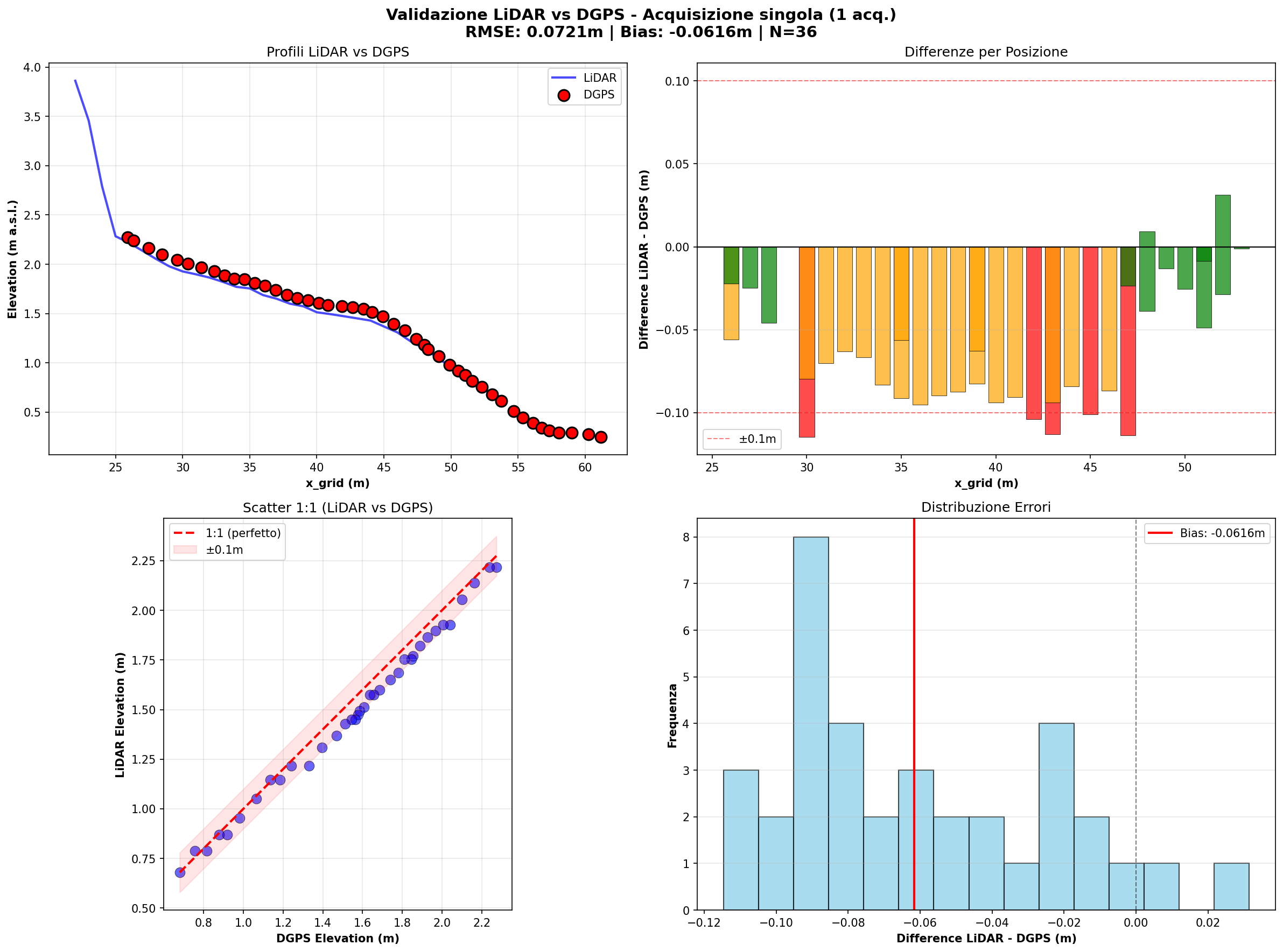
TYPE 4 identifies the most vulnerable sectors: environments subject to both net sediment loss and large fluctuations over time. It is the strongest response signal to erosion and accretion cycles induced by storm events. TYPE 4 points are highlighted with a red diamond symbol in the volatility chart. Stage 3 — DGPS-RTK validation and geometric calibrationThe conceptTo determine how reliable the LiDAR measurements are, periodically an operator physically walks the beach with a high-precision GPS receiver (DGPS-RTK), recording sand elevation at a series of points along the monitored transect. These field data, accurate to the centimetre, are then automatically compared with LiDAR profiles: the residual difference — the system error — is measured and, if necessary, used to correct the sensor geometry. The process is similar to the periodic calibration of a measuring instrument: even a well-installed sensor can accumulate small errors over time, and comparison with independent measurements is the only way to detect and correct them.
Fig. 2 — Comparison between the LiDAR profile (solid line) and DGPS-RTK measurements (points). Agreement is evaluated via RMSE, systematic bias and spatial distribution of residuals. Technical details
The validation script (
1. Transect projection — the UTM position of the DGPS point
is converted to The calculated metrics are:
The operational quality levels defined for the RVMC system are:
When residuals show a systematic increasing trend with distance from the sensor
(linear error in residuo(x) = a · x + b → θpitch = arctan(a)
The estimated angle is entered in the station's Validation results of pilot stationsCurrently, two stations have been validated with field DGPS-RTK data. The results document the progression of the calibration process.
The Kufra station required a complete two-step calibration process:
correction of the The remaining 3 LiDAR stations (Senigallia, Viareggio, Marina di Castagneto Carducci) are awaiting their respective field survey campaigns. Station network and operational systemThe network currently comprises 11 stations, of which 5 are equipped with SICK LD-LRS sensors, distributed along the Adriatic and Tyrrhenian coasts. Raw data are archived in CSV format on the ISPRA processing server and periodically processed through the pipeline described on this page. Results — mean profiles, cumulative variation maps and volatility charts — are available in the Multi-temporal LiDAR Analyser and in the LiDAR Scan Analyser.
The centralised configuration in Continue to the next page: wave runup monitoring on the beach |