|
Monitoraggio impatto mareggiate e della risalita ondosa sulla spiaggiaLa rislaita ondosa sulla spiaggia | runup | e la sua misuraIl runup è la risalita massima dell'acqua sulla spiaggia emersa durante il ciclo di swash (risacca): il punto più lontano dalla riva raggiunto dal fronte d'onda in risalita. La sua posizione e la sua quota determinano quanta spiaggia viene inondata durante una mareggiata e con quale frequenza. Monitorare il runup nel tempo permette di valutare l'impatto delle mareggiate sulla spiaggia, stimare il rischio di inondazione ed erosione costiera, e calibrare modelli numerici di propagazione ondosa. Il sistema LiDAR della rete RVMC effettua ogni giorno alle ore 12:00 una scansione continua della durata di 120 secondi, a differenza delle scansioni istantanee degli altri orari (06:00, 10:00, 14:00). In questi 120 secondi il laser compie circa 900 rotazioni complete a 8 Hz, producendo una serie temporale densa della quota della superficie — sia della spiaggia emersa che del pelo libero dell'acqua. Da questa serie vengono estratti automaticamente il livello medio dell'acqua, le sue oscillazioni e la posizione di runup massimo. Schema della proceduraIl processo si articola in quattro fasi, eseguite ogni giorno in modo automatico sul file della scansione delle ore 12:00.
1. Segmentazione in rotazioni — il file grezzo viene suddiviso
in singole rotazioni del laser (~550 punti ciascuna, ~125 ms di durata) identificando
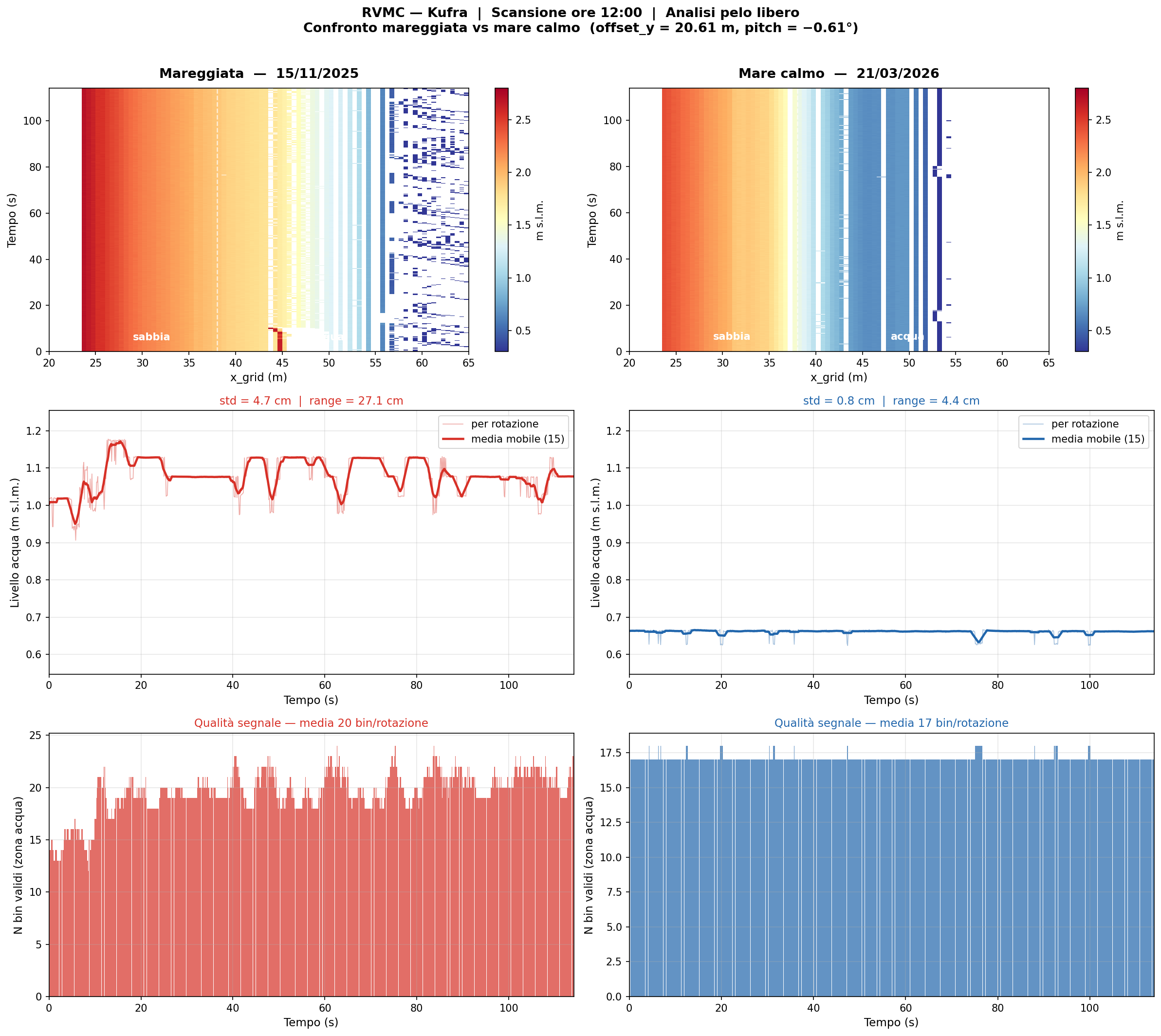
i gap temporali tra una rotazione e la successiva. Stadio 1 — La heatmap quota-tempoIl concettoLa misurazione continua di una porzione di spiaggia fornisce, nel nostro caso, 900 misure della quota del suolo in ogni punto lungo il transetto. Un modo di rappresentare, e quindi descirvere, l'andamento temporale di tutte queste misure è fornito dall'immagine — heatmap — in cui l'asse orizzontale rappresenta la distanza dalla postazione del sensore, l'asse verticale il tempo, e il colore la quota del suolo o della superficie dell'acqua. Nella zona di spiaggia asciutta il colore è stabile nel tempo; nella zona dell'acqua il colore cambia ad ogni misura, riflettendo il moto ondoso.
Fig. 1 — Heatmap quota-tempo per due condizioni meteo-marine a confronto. A sinistra: mareggiata (15/11/2025), con forte variabilità cromatica nella zona acqua (x > 42 m). A destra: mare calmo (21/03/2026), con zona acqua quasi uniforme che scompare oltre x = 53 m per effetto della riflessione speculare. Approfondimento tecnico
Le singole rotazioni vengono identificate nel file CSV grezzo rilevando i gap
temporali superiori a 50 ms tra punti consecutivi (timestamp in microsecondi).
Per ogni rotazione e per ogni bin spaziale di 0.5 m lungo l'asse
Il profilo di riferimento della spiaggia viene calcolato come mediana di tutte le rotazioni per ogni bin spaziale. L'uso della mediana anziché della media garantisce robustezza agli ostacoli temporanei (persone, oggetti) che possono occupare la battigia per alcune rotazioni producendo quote anomale. Stadio 2 — Discriminazione adattiva sabbia/acquaIl concettoLa spiaggia asciutta è una superficie rigida nel brevissimo termine: la sua quota non cambia tra una rotazione del laser e la successiva. La superficie dell'acqua, al contrario, si muove con le onde: la sua quota varia continuamente nel tempo. Il sistema sfrutta questa differenza per identificare automaticamente dove finisce la sabbia e inizia l'acqua — senza dover conoscere in anticipo la quota della riva. Tuttavia, il comportamento del laser cambia in funzione delle condizioni del mare. Con il mare mosso, l'acqua restituisce un segnale variabile e riconoscibile. Con il mare calmo, la superficie dell'acqua è quasi speculare: il raggio laser rimbalza via senza tornare al sensore, producendo non un segnale variabile ma una assenza di segnale. Questa differenza fisica richiede due criteri distinti per identificare il confine sabbia/acqua. Approfondimento tecnicoPer ogni bin spaziale si calcolano due metriche dalla heatmap:
• Deviazione standard temporale std(x) — quanto
oscilla la quota in quel bin nel corso delle ~900 rotazioni. Nella sabbia asciutta
std(x) ≈ 0.5 cm (rumore strumentale); nell'acqua agitata std(x) > 1.5 cm. Il confine sabbia/acqua viene identificato con un doppio criterio adattivo, applicato sul profilo std(x) e cov(x) smoothed su una finestra spaziale di 2.5 m:
Quando entrambi i criteri sono soddisfatti, viene scelto il confine più vicino
a riva. Il criterio attivato viene registrato nell'output
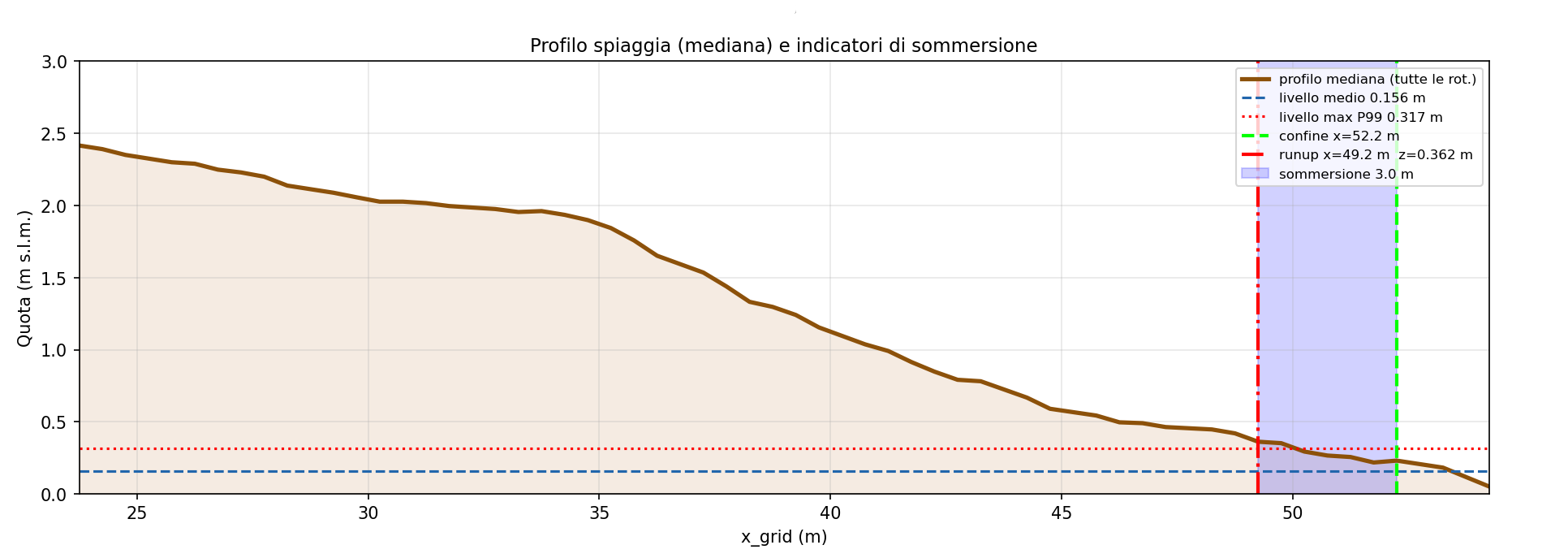
( Nota sulla sabbia umida e sul gradiente di saturazione. Durante le mareggiate, il moto di swash lascia un gradiente di umidità sulla spiaggia: le zone più vicine al limite di risalita sono più bagnate di quelle più arretrate. La sabbia umida ha un comportamento intermedio tra la sabbia asciutta e l'acqua libera: la riflessione del laser è variabile tra una rotazione e la successiva in funzione del grado di saturazione. Questo significa che il confine identificato dallo std alto rappresenta non solo il pelo libero dell'acqua, ma l'intera zona di bagnasciuga attiva durante la finestra di 120 secondi. Il confine va interpretato come stima del limite di influenza dello swash, non come posizione istantanea della riva. Stadio 3 — Metriche del pelo libero e del runupIl concettoUna volta identificata la zona "acqua", il sistema estrae per ogni rotazione la quota media della superficie dell'acqua in quella zona, costruendo una serie temporale del livello con risoluzione di ~125 millisecondi. Da questa serie si calcolano il livello medio, le oscillazioni e il punto di massima risalita dell'acqua sulla spiaggia. Il livello medio rappresenta la quota della superficie dell'acqua indipendentemente dal moto ondoso — è influenzato dalla marea e dal setup ondoso sottocosta. Il livello massimo (percentile 99 della serie temporale) rappresenta il massimo sovralzo raggiunto dall'acqua nei 120 secondi di acquisizione. La deviazione standard del livello è l'indice di agitazione: bassa in condizioni calme (circa 0.5 cm), alta durante le mareggiate (tipicamente 5–10 cm, con picchi oltre 20 cm).
Fig. 2 — Profilo mediano della spiaggia (curva marrone) con indicatori di runup. La linea tratteggiata blu indica il livello medio dell'acqua; la linea punteggiata rossa il livello massimo (P99). La linea verticale rossa indica la posizione x_grid di massima risalita (runup); la zona ombreggiata in blu la spiaggia raggiunta dall'acqua. Approfondimento tecnicoLe metriche calcolate per ogni acquisizione sono le seguenti:
Quando la superficie è speculare (mare calmo, criterio B), le rotazioni
oltre il confine non restituiscono segnale e il livello non può essere
misurato direttamente. In questo caso il livello è stimato dalla quota
del profilo mediano in corrispondenza del confine (ultimo punto con ritorno
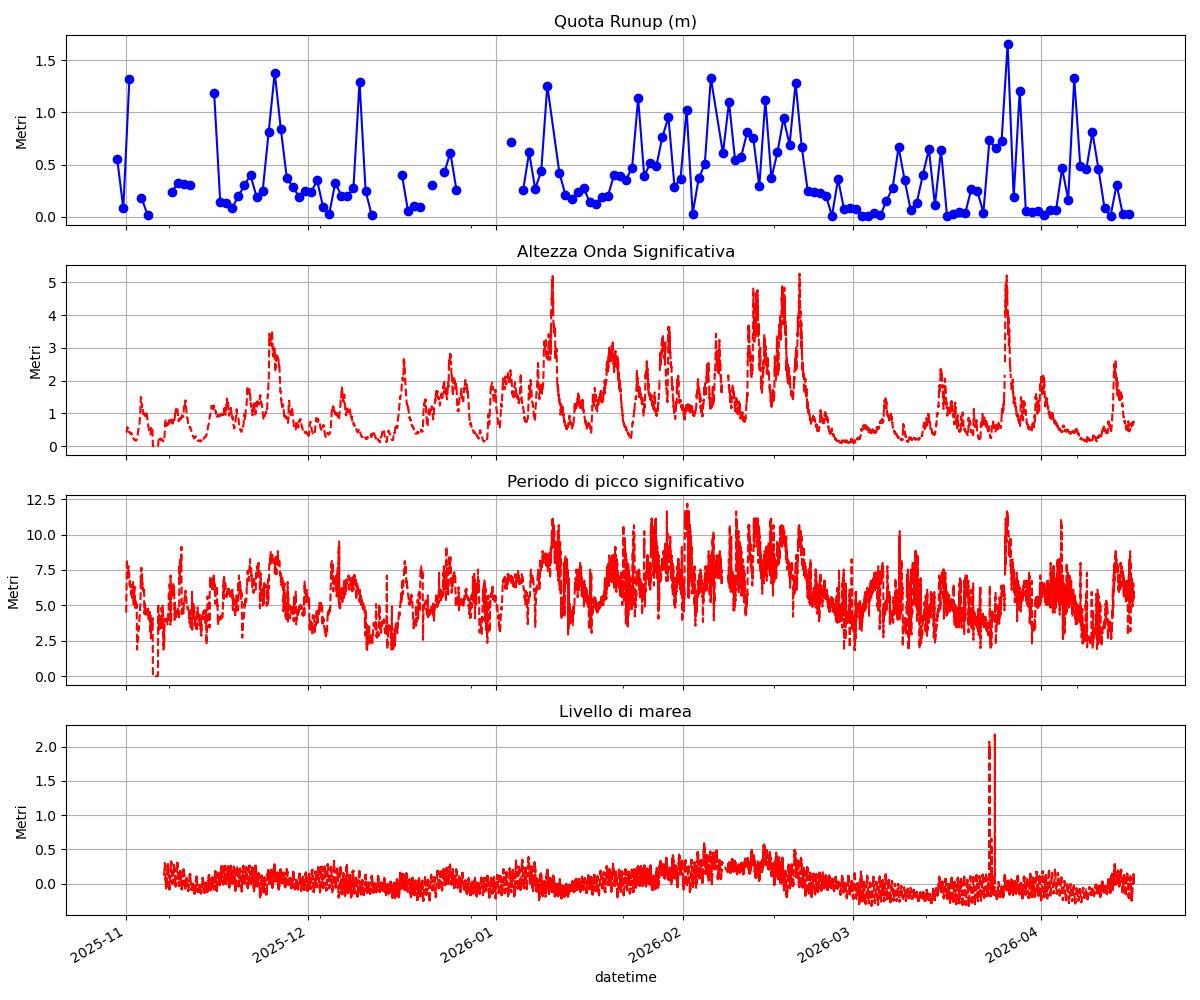
laser), e la colonna Serie temporale e aggiornamento operativoIl concettoLe metriche calcolate ogni giorno vengono archiviate in una serie temporale che si accumula nel tempo, permettendo di ricostruire la storia del runup e dello stato del mare per ogni stazione della rete. Nel grafico seguente è possibile vedere come il runup vari nel corso dei mesi, con picchi in corrispondenza delle mareggiate invernali e valori bassi nei periodi di bel tempo. Il confronto con i dati ondosi misurati al largo (altezza d'onda significativa, periodo di picco) e con il livello di marea permette di contestualizzare ogni evento e di verificare la coerenza fisica dei risultati.
Fig. 3 — Serie temporale della quota di runup (pannello superiore) a confronto con l'altezza d'onda significativa Hs, il periodo di picco Tp e il livello di marea misurati al largo della stazione Kufra (novembre 2025 – aprile 2026). I picchi di runup coincidono con gli eventi di mareggiata più intensi. Approfondimento tecnico
La procedura operativa viene eseguita automaticamente ogni notte alle 05:00 dal
server di elaborazione ISPRA (ecap1). Lo script
I dati arrivano su ecap1 la notte precedente tramite download FTP automatico (cron delle 03:00), rendendo disponibili sul portale i dati del giorno precedente con un ritardo massimo di circa 26 ore dall'acquisizione.
03:00 — download CSV via FTP da tutte le stazioni Integrazione con il sistema di videomonitoraggio MOVICOIl sistema LiDAR e il sistema MOVICO operano in parallelo sulle stesse stazioni e si completano a vicenda nell'analisi del runup. MOVICO estrae la posizione planimetrica della linea di riva in coordinate UTM da immagini timex, fornendo la componente orizzontale della risalita (dove arriva l'acqua in pianta). Il LiDAR misura la quota assoluta della superficie, fornendo la componente verticale (a che quota arriva l'acqua). La combinazione delle due misure è alla base della stima della pendenza del fronte spiaggia (foreshore slope): tan(β) = Δh / Δx dove Δh è la differenza di quota tra due posizioni della riva corrispondenti a livelli idrici diversi (ricavabili dai dati mareografici), e Δx è lo spostamento planimetrico misurato da MOVICO. La pendenza del fronte spiaggia è un parametro fondamentale per la valutazione del rischio di inondazione costiera e per la stima empirica del runup tramite le formulazioni di Stockdon et al. (2006). Riferimenti metodologici principali:
|